����1.�҇����ߌӽ������~�l�����ߌӽ��������ИI��ٿ��ṩ���İlչ
�����S���҇������ͿƌW���g�İlչ�����ߌӽ�����uʢ�С��҇������ߌ������lչʼ��1990 �꣬1990~2007 ���dz��ߌӽ�������2008~2013 ��鳬�ߌӽ����Ŀ��ٰlչ�ڡ��Ը߶Ȟ����������Č����ߌӽ����֞�����4 ���^�Σ�250~300m��300~400m��400~500m �Լ�500m ���ϡ�����2013 �꣬�҇������ɼ���픳��ߌӽ���119 ������߶ȷֲ�������D1 ��ʾ��250~300m �ij��ߌӽ���������࣬�sռ����������60%;500m ���ϳ��ߌӽ����H�ɴ���
����Ŀǰ�҇��ڽ���250m ���ϳ��ߌӽ�����68 ��������500 ��������4 ��;�A���250m ���ϳ��ߌӽ�����122 ����Ҏ����250m ���ϵij��ߌӽ�����Ӌ146 ������Ҋ����δ��ʮ����҇���ӭ�����ߌӽ����ķ��s�ڡ�

�����S�����ߌӽ����Ŀ��ٰlչ�����N���͏��s�w�ͼ����s�Y���wϵ�������F����Y���wϵ�ʬF���ӻ����߶ȳ��^250m �ij��ߌӽ����Y��һ�����Ͳ�w�Y�����������- ����Ͳ����Ͳ- ����Ͳ�����Ϳ��- ����Ͳ�;��Ϳ��- ����Ͳ- ����֧��4 �N�Y���wϵ���քe�m���ڲ�ͬ�߶ȵij��ߌӽ�������1 �г����ֳ��ߌӽ����ĽY���wϵ��

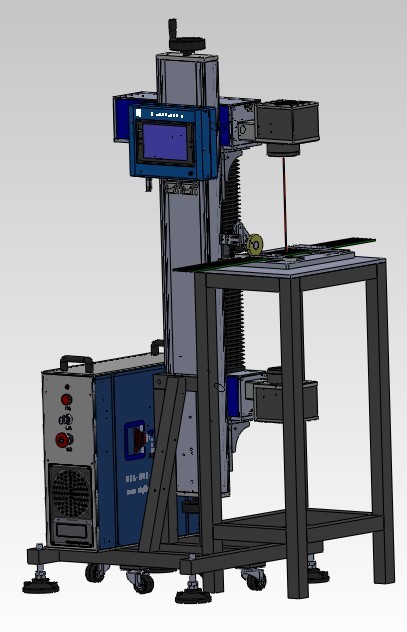
����2.���ߌӽ���ģ�ܼ��g
�������ߌӽ������̵�ʩ�����g��Ҫ�������������ͼ��g����ֱ�\ݔ���g��ģ�ܼ��g�͜y����λ���g�ȡ����У�ģ������ʩ������ƽ�_�Ͱ�ȫ���o���dz��ߌӽ����Y��ʩ�����P�I���g���ƌW������ģ�ܼ��g���������P�����Y�����|������ȫ��ʩ���M�ȣ����Ҍ�������rҲ����Ӱ푡�
����Ŀǰ���ñ��^�V���ij��ߌӽ���ģ�ܼ��g����Ҫ����늄����w�����_�ּܼ��g��Һ���Ԅ�����ģ�弼�g�����w�����ƽ�_ģ�弼�g�ȣ��������ɫ������Y�Ͼ��w���̣��քe�����Nģ�ܼ��g�M�н�B��
����3. 늄����w�����_�ּܼ��g
����3.1 ��ˇ���c
����늄����w�����_�ּܼ��g�ǂ��y����_�ּܡ�ɢƴɢ�bģ�弼�g���ش�lչ���ǬF���Cе���̼��g���Ԅӿ��Ƽ��g�c���y�_�ּ�ʩ����ˇ��Y�ϵĮa��c����_�ּܺ������_�ּ���ȣ�늄����w�����_�ּܼ��g�����@���ă��c��
����3.1.1 �˜ʻ��̶ȸߡ�늄����w�����_�ּܲ��ؘʻ����ͮaƷ��ͨ���ԏ������D�ʸߡ�
����3.1.2 ʩ���ɱ��͡����ö��ͻ�䓹����������Һ����ģ�����w�ɱ��͡�
����3.1.3 �w���m���ԏ������w�����_�ּܿ��Ը��������w���`��ã��M���w�͏��s�Ľ������̵�ʩ����Ҫ����������늄����w�����_�ּܼ��g�������σ��c���ŵ����ڳ��ߌӽ���ģ�ܼ��g��ռ��һϯ֮�ء�ͬ�r�����Һ����ģ���g�����w�����ƽ�_���g��늄����w�����_�ּܼ��gҲ���������w�����������I��Mխ��ʩ��Ч�ʵ͵�ȱ�c��
����3.2 ���̑��Ì���
����3.2.1 �������c
�����ϲ��G������V������A �^�p���������ǿ��߶Ȟ�283m���Y����63 �ӣ���D2 ��ʾ���Q��Y���wϵ���ÿ�ܡ�����Ͳ�wϵ���˜ʌӸߞ�4.1m���ǘˌӸ߶���3.2m��4.5m��5.0m��5.55m��6.0m �ȶ�N���Y��ƽ���Π�׃���e���ң��ɵײ�ƽ��ĈA�������Σ��u׃���в��ĈA�Σ��ٵ��ϲ���ʮ�ֻ�����Y�����θ�ҕ�D��D2 ��ʾ��
��

����ԓ���̽Y���w�͏��s������������Π���L׃���e�o����oģ�幤�̎����ஔ���y�ȣ���Ҫ�������ׂ����棺
����3.2.1.1 ����������
�����Y������������ʮ�ַ���������Aб���փ��գ���45������ַ���Ȃ��տs�Aб�������ģ���wϵ���x��Ͳ�������˘O������y��
����3.2.1.2 Ť�D����
������D3 ��ʾ�� ԓ�����������Ť�D����1.1�㣬�Cλ��Ť�D�����ƫ������65mm����ˣ����w��ҪŤ�D���������m���Y���wϵҪ�����ܵ�����Ҫ������˸��ߵ�Ҫ��

����������б�ʺ�Ť��׃���̶ȷdz�����Һ���Ԅ�����ģ�弼�g�����w�����ƽ�_ģ�弼�g�����y��ʩ����K�x���˽Y���w���m���ԏ���늄������_�ּܼ��g��
����3.2.2 ģ���wϵ
����늄����w�����_�ּ���Ҫ����������ϵ�y����Ϣ�ɼ��Ϳ����_�����A�ͷ����b�á��̶����Y�b���Լ��_�ּܽY���wϵ�M�ɡ�ģ�ܽY���wϵ���ÃəCλ�ӏ���Ԫ�������wϵ����б���܆�Ԫ���ÃɌ�������Լӏ��Y�����ȣ���D4 ��ʾ��

����3.2.3 ��������
����3.2.3.1 ���w·��
�������]���Y���wϵ���w�͏��s��׃��ʩ�����ٶ��y�Լӿ죬ԓ���̲��ú���Ͳ��������ͬ��ʩ���ļ��g·�������m������߅�L����׃����Ҫ��늄������_�ּ܆�Ԫ�����ɂ��Cλ��һ���M��������Ԫ����Ԫ�c��Ԫ֮�g�O���Ԅ���s�R�壬�������O�ÿ���s���o���塣�M��������Ԫ�M���˿��g�Y���OӋ��ʹ��M����w��������������Ť�D�����Ą���Ҫ���ژ��칦���ϣ��O�ýM��ͨ�L��܉�Ϳ��A�����b�ã��M�������������������Ĺ���Ҫ��
����3.2.3.2 ƽ�沼�÷���
����늄������_�ּܲ��Æ�Ԫʽ�ĽY����ʽ�������܆�Ԫ֮�g�����������ֿ���ͬ�������������`���Ժú��m���ԏ������c��ÿ�����ǹ��O�����24 �M��48 ���Cλ����Ӌ48 �M�����ܣ�96 ���Cλ���Cλ���ÈD��D5 ��ʾ��

����3.2.3.3 ����������
����ᘌ������������@һ�y�}����ÿ���Cλ�O���p���A�b�ã�ͬһƽ���O��4 ֻ���A��݆��ÿ����Ԫ�Q����3 �ӣ���12ֻ���A��݆��
����3.2.3.4 Ť�D����
�������w�����^�������l��Ť�D���t�����A�b���g����������λ�ƶ����������wҲ�����^���׃�������ܾ���ȑ�������ˣ�������k���˷�Ť�D�������y�}��ͨ�^��ȡ�����۴�Ť����˼·����Ť�D�����^���D����ƽ�������͙Cλ�ȿs�ɂ��^�̡��˹�ˇ·�����Խ�QŤ�D�������y�}���乤ˇ��D6����������λ��б���U���b������ͨ�^���ӹ̶���֧����β�����քӺ��J�팍�F�Cλ���ƣ��Ķ����F���wŤ�D��
�����ϲ��G������V�����̲���늄����w�����_�ּ��wϵ�����C�˹�����2013 ��11�����������
 ��һ�123��һ�
��һ�123��һ�
�����ձ�¹�u��˾�c�������Ӯa��˾�������_�l����һ�N�p���g��ͨ�^�ڳ��ߌӽ�����������O�Î���ƽ���N��犔[ʽ�b�ã���ʹ�L���ڵ����ӵȻ΄ӵķ��Ȝp�롣Ŀǰԓ���g���_������ˮƽ�������������Ӯa�\�I�Ė|�������ޅ^����������B���״β��á�
����2011��3��22-23�ա����Čó��ߌӽ����a�I��������Ϻ��e�k�������������W�ޡ��Ж|�^���n�����Ї���ۡ��_������ꑵȵ^�ij��^300��λ�ĘI���Y����ʿ�R��һ�ã��ͳ��ߌӽ����������Ŀ�����H�I���OӋ������Mʩ�����g�������O���c���ϵ�

����ס�������սM�������ˡ��Gɫ���ߌӽ����u�r���g���t��������Gɫ���ߌӽ�����Ҏ���OӋ��ʩ����պ��\�й�����������